Boston Dynamics의 Spot과 같은 로봇의 확산은 사족보행 로봇의 다재다능함을 입증했습니다. 이러한 시스템들은 계단 등반, 작은 장애물 통과, 그리고 불규칙한 지형 이동에 탁월합니다. 하지만 사다리는 여전히 중요한 난관입니다. 특히 이러한 시스템이 배치되는 공장이나 기타 산업 환경에서 사다리는 매우 흔하게 발견되기 때문입니다.
최근 가장 혁신적인 사족보행 로봇 연구를 수행해 온 취리히 연방 공과대학교(ETH Zurich)가 이 문제에 대한 해결책을 제시했습니다. 학교가 언급하기로는, 과거 사다리 등반을 시도했던 프로젝트들은 주로 이족 보행 방식의 휴머노이드 로봇이나 특수 제작된 사다리에 의존하는 경향이 있었으며, 이로 인해 실질적인 효율성을 확보하는 데 어려움을 겪었습니다.
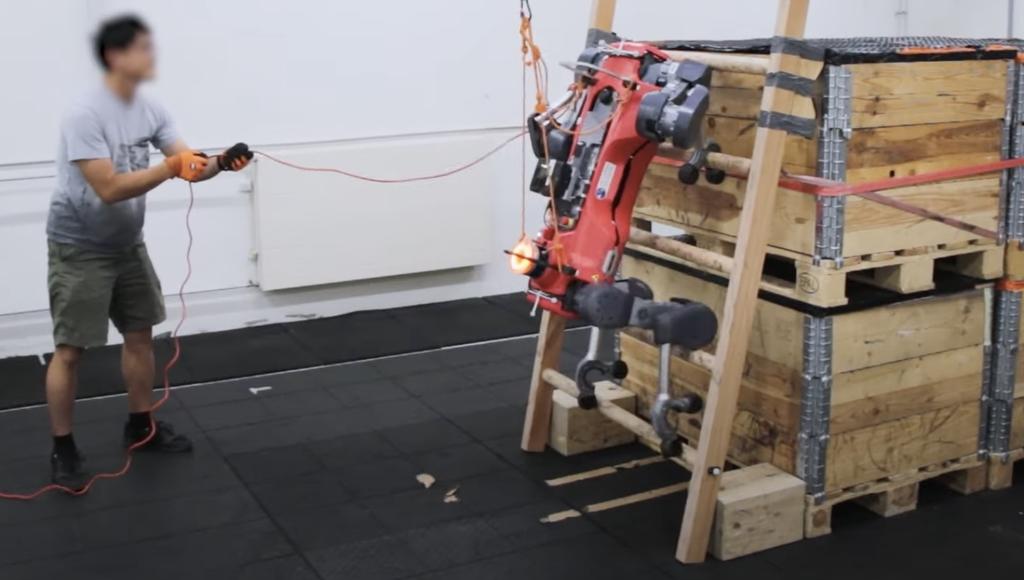
이번 연구는 학교가 자체 스핀오프사인 ANYbotics의 ANYMal 로봇을 활용하여 진행되었습니다. 연구팀은 사족보행 로봇에 사다리 발판(rungs)에 고정하는 특수 엔드 이펙터(end effectors)를 장착했습니다. 그러나 핵심 기술은 강화 학습(reinforcement learning)입니다. 이 기술은 시스템이 다양한 사다리마다 지닌 고유한 특성(peculiarities)에 유연하게 적응할 수 있도록 돕습니다.
연구진은 "본 연구는 산업용 사족보행 로봇 애플리케이션의 범위를 단순한 지형 점검을 넘어 환경 내의 까다로운 인프라 구조물로 확장시키며, 복잡한 동작 수행 시 로봇 형태학(robot morphology)과 제어 정책(control policy) 간의 시너지를 강조한다"고 설명했습니다.
이 결합된 시스템은 70도에서 90도 범위의 사다리 각도를 통과하는 데 90%의 성공률을 보였습니다. 또한 현재의 '최첨단' 시스템 대비 등반 속도가 232배 증가했다고 보고했습니다. 더욱이 이 시스템은 실시간으로 자체 수정
이 가능하여, 이동 예측에 오류가 발생했거나 발걸음 타이밍이 부정확했던 경우에도 등반 동작을 스스로 조정할 수 있습니다.
[출처:] https://techcrunch.com/2024/10/02/four-legged-robot-learns-to-climb-ladders