보행자를 치거나 전봇대에 충돌하지 않는 자율주행차의 핵심 열쇠가 운전석에 앉은 인간형 로봇일까요? 도쿄대학교 연구진들은 그렇게 보고 있으며, 이번 주에 새로 발표한 기술 논문에서 그 주장을 제시했습니다.
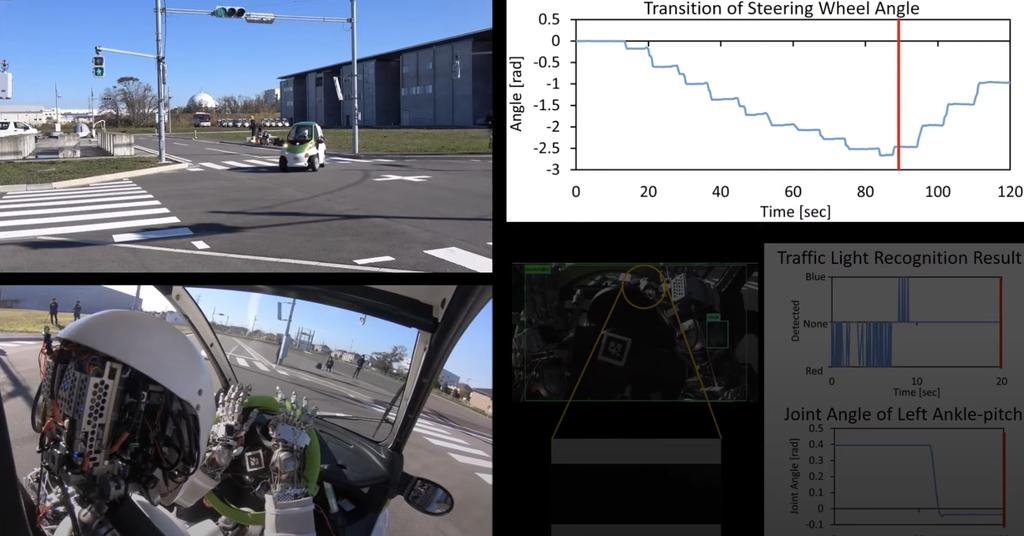
토요타 컨설턴트 중 한 명인 이 연구진들은 '무사시(Musashi)'라는 '근골격 인간형 로봇(musculoskeletal humanoid)'을 개발하고 훈련시켜 소형 전기차를 테스트 트랙에서 운전하게 했습니다. 인간의 눈을 대신하는 두 개의 카메라를 장착한 무사시는 전방 도로 상황은 물론, 차량 사이드미러에 비친 모습까지 '관찰'할 수 있습니다. 또한, 기계 팔을 이용해 차량 키를 돌리고, 주차 브레이크를 당기며, 방향 지시등을 켜는 동작도 수행 가능합니다. 미끄럼 방지 설계된 '발'을 통해 가속 페달과 브레이크 페달을 밟을 수도 있습니다.
저희가 《로보틱스 및 자동화 매거진(Robotics and Automation Magazine)》에 발표한 논문은 현재 arXiv와 YouTube에서 확인할 수 있습니다!
Toward Autonomous Driving by Musculoskeletal Humanoids: A Study of Developed Hardware and Learning-Based Software
arxiv:
https://t.co/1XwY5hiLjU
youtube:
https://t.co/eu4H61TC77
— Kento Kawaharazuka / 河原塚 健人 (@KKawaharazuka)
2024년 6월 11일
연구진들은 무사시에게 원시 센서 데이터를 주입하며 차량의 스티어링 휠 사용법을 '교육'한 후, 로봇이 신호등 신호를 준수하며 교차로에서 코너를 돌아나가는 데 성공했다고 주장합니다.
그러나 몇 가지 한계점도 존재합니다.
첫째, 무사시는 코너를 돌 때 가속 페달을 밟기보다 브레이크 페달에서 '발'을 조심스럽게 떼는 방식으로만 운행했습니다. 연구진은 이를 기술적 한계와 과도한 주의 덕분이라고 설명했지만, 그 결과 코너를 도는 데까지 약 2분이 소요되었습니다.
별도 실험에서는 가속 페달을 사용했지만, 연구진들은 도로 경사의 급격함에 따라 일정한 속도를 유지하는 데 어려움이 있었다고 전했습니다.
따라서 개선해야 할 점이 분명합니다. 다행히 연구진은 이 도전에 적극적으로 임할 계획이며, 차세대 로봇 및 소프트웨어 개발 계획을 가지고 있습니다. 아마도 수십 년 후쯤이면, 무사시가 여러분의 다음 도쿄 택시 운전석에 앉아 있을지도 모릅니다.
[출처:] https://techcrunch.com/2024/06/12/this-humanoid-robot-can-drive-cars-sort-of