테슬라의 FSD(Full Self-Driving) 훈련이 계속됩니다.
테슬라의 최첨단 컴퓨팅 환경과 테스팅 방법론 심층 분석
테슬라는 자사의 다양한 제품 라인업에 걸쳐 초고사양 컴퓨팅 플랫폼을 통합하고 있으며, 이 플랫폼들은 자동차의 인포테인먼트 시스템부터 자율주행(Full Self-Driving, FSD)의 핵심 두뇌에 이르기까지 핵심적인 역할을 수행합니다. 이러한 시스템들이 최고 수준의 성능과 안정성을 갖추기 위해서는 매우 정교하고 까다로운 테스트가 필수적입니다.
1. 컴퓨팅 아키텍처의 기반: SoC와 고성능 프로세싱
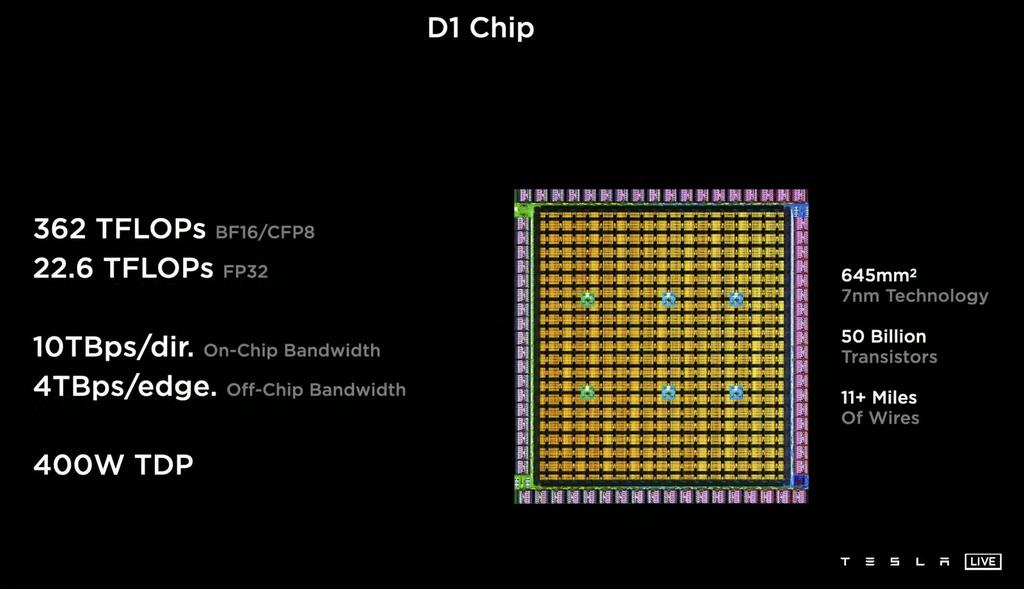
테슬라의 핵심 컴퓨팅 장치는 일반적으로 시스템 온 칩(SoC) 아키텍처를 기반으로 구축됩니다. 이 SoC는 중앙처리장치(CPU) 코어, 그래픽 처리장치(GPU) 코어, 그리고 인공지능(AI) 추론 및 데이터 처리에 특화된 여러 가속기(Accelerator)를 하나의 칩에 통합합니다.
주요 특징:
- 다중 코어 및 병렬 처리: 차량 환경의 실시간 데이터 처리 요구 사항을 충족하기 위해, CPU는 다중 코어를 활용한 병렬 처리에 중점을 둡니다.
- AI 가속기 최적화: 자율주행 시나리오에서 발생하는 방대한 양의 센서 데이터(LiDAR, 카메라, 레이더)는 실시간으로 처리되어야 하며, 이를 위해 딥러닝 추론에 특화된 가속기가 핵심적으로 사용됩니다.
- 운용 체제: 이러한 시스템들은 높은 신뢰도와 실시간 응답성이 요구되는 임베디드 운영체제(Embedded OS) 환경 위에서 구동됩니다.
이처럼 고도로 통합되고 복잡한 아키텍처는 제품의 성능을 최대한으로 끌어올리기 위해, 가장 까다로운 스트레스 테스트를 거쳐야 합니다.
2. 극한의 테스트를 위한 전문화된 테스트 환경 구축
테슬라가 개발하는 컴퓨팅 플랫폼들은 단순히 작동하는 것을 넘어, 가장 혹독한 조건에서도 오작동하지 않음을 증명해야 합니다. 이를 위해 전문화된 테스트 챔버와 시뮬레이션 환경이 활용됩니다.
A. 챔버 환경 테스트 (Chamber Testing)

테스트는 단순히 기능 검증(Functional Verification)에 그치지 않습니다. **환경 스트레스 테스트(Environmental Stress Testing)**를 통해 기계적, 열적, 전기적 변동에 대한 내구성을 검증합니다.
- 온도 순환 테스트 (Thermal Cycling): 차량은 극한의 기온 변화를 겪습니다. 엔진룸의 고열부터 영하의 추운 겨울밤까지, 온도가 급격하게 변하는 사이클을 반복하며 부품의 열팽창 및 수축에 의한 결함(Crevice, Fatigue) 발생 여부를 확인합니다.
- 진동 및 충격 테스트 (Vibration and Shock Test): 차량은 도로의 노면 상태에 따라 끊임없이 진동합니다. 이 테스트는 고속 주행, 충격 흡수 등을 시뮬레이션하며, 모든 연결 부위(커넥터, 납땜 부위 등)가 지정된 가속도와 진동 주파수 내에서 버틸 수 있는지 검증합니다.
B. 성능 및 스트레스 테스트 (Performance and Stress Test)
시스템이 최대 부하(Peak Load) 상황에 놓였을 때의 성능 저하 여부를 검증하는 것이 중요합니다.
- 고부하 병렬 처리 시뮬레이션: 자율주행 시스템은 동시에 수십 개의 센서에서 들어오는 데이터를 처리하며, 경로 계획, 위험 예측, 제어 신호 전송 등 모든 모듈이 최대 병렬 부하 상태에 놓입니다. 이 테스트는 CPU/GPU/AI 가속기가 정해진 시간 내에 필요한 계산을 모두 완료하는지(Deadline Monitoring)를 측정합니다.
- 지속성 테스트 (Soak Test): 시스템을 오랫동안(수백 시간) 최고 부하 상태로 구동하며, 메모리 누수(Memory Leak)나 열 관리 시스템의 점진적 성능 저하와 같은 장기적인 안정성 문제를 찾아냅니다.
3. 테스트 방법론의 고도화: 시뮬레이션과 실시간 검증의 결합

테슬라의 테스트 전략은 단일 테스트에 의존하지 않습니다. HIL(Hardware-in-the-Loop) 시뮬레이션을 통해 실제 차량 환경을 가상으로 재현하면서 하드웨어를 테스트하는 것이 핵심입니다.
HIL 시뮬레이션 과정:
- 가상 환경 구축: 가상의 차량 모델과 도로 환경(날씨, 교통 흐름, 장애물 등)을 소프트웨어로 구축합니다.
- 입력 데이터 주입: 이 가상 환경에서 발생한 수많은 센서 데이터(예: 가상 카메라의 이미지 스트림, 가상 레이더의 거리 정보)를 실제 하드웨어(DUT, Device Under Test)의 입력 포트로 실시간으로 주입합니다.
- 피드백 루프 검증: DUT가 계산한 제어 출력 신호(예: '브레이크를 30% 깊이로 밟아라')가 다시 시뮬레이션 환경으로 들어가 가상의 차량 움직임에 영향을 미치는지 확인합니다.
이 순환 구조를 통해, 물리적으로 구현하기 어렵거나 시간이 지나기 어려운 극단적인 상황(예: 순간적인 전력 부족, 돌발적인 센서 데이터 손실)을 반복적으로 재현하여 소프트웨어와 하드웨어의 결합 지점에서 발생 가능한 모든 종류의 오작동을 사전에 제거합니다.
결론적으로, 테슬라의 컴퓨팅 플랫폼은 단순한 하드웨어의 집합체가 아니라, 열역학, 전자공학, 소프트웨어 공학, 그리고 심리학적 모델링(운전자 및 보행자 예측)이 통합된 살아있는 시스템에 가깝습니다. 이를 검증하기 위해 가장 진보하고 가혹한 테스트 방법론들이 동원되고 있습니다.