한 발을 다른 발 앞에 내딛습니다.
이전에 멋진 3D 프린터에 대한 사례를 많이 봤고 로봇에 대해서도 생소하지 않지만, 이번에 소개된 것은 스스로 조립 라인을 따라 걸어 다닐 수 있는 최초의 3D 프린팅 소프트 로봇입니다. 이 로봇은 에든버러 대학교(The University of Edinburgh)의 팀에 의해 설계 및 제작되었습니다. 해당 프로젝트 저널에 따르면, 이 프로젝트의 주요 목표는 '유체 기반 소프트 시스템(fluidic soft systems)' 분야의 개선에 있었습니다.
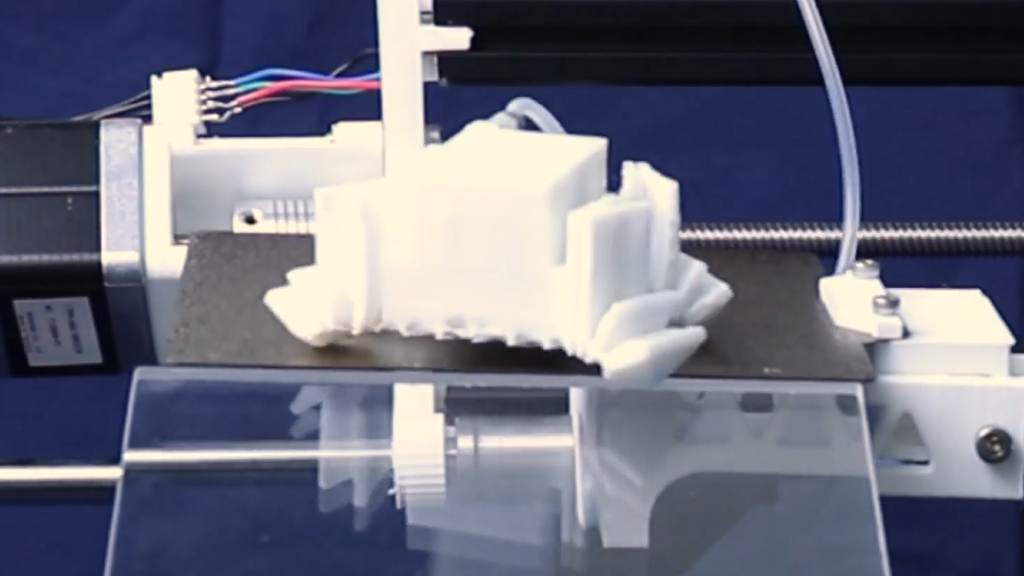
개발팀은 여기서 볼 수 있는 로봇 보행 장치와 같은 유체 기반 소프트 시스템을 3D 프린팅하기 위해 특화된 새로운 3D 프린팅 시스템을 개발해야 했습니다. 특히 유체 공학 부품 제작에 사용되는 유연한 소재는 3D 프린팅 과정에서 복잡성이 발생하여 제작 난이도가 높았습니다.
로봇이 갓 3D 프린팅되었는데 어떻게 움직일 수 있는지 의아할 수도 있습니다. 이는 오늘날 매우 이질적이고 일반적이지 않은 아이디어입니다. 하지만 간단히 설명드리자면, 그 비결은 공기압에 있습니다. 프린팅 직후 로봇에 호스가 연결되어 압력이 축적되고, 이 압력이 3D 프린팅된 내부 채널을 따라 이동하며 로봇을 움직이게 만듭니다.
Harvard 연구원들, 소프트 로봇을 위한 새로운 3D 프린팅 방법 개발
연구원들, 단세포 생물 크기의 로봇을 3D 프린팅하다
과학자들이 로봇을 위한 3D 프린팅 가능한 'eFlesh' 디자인 공유
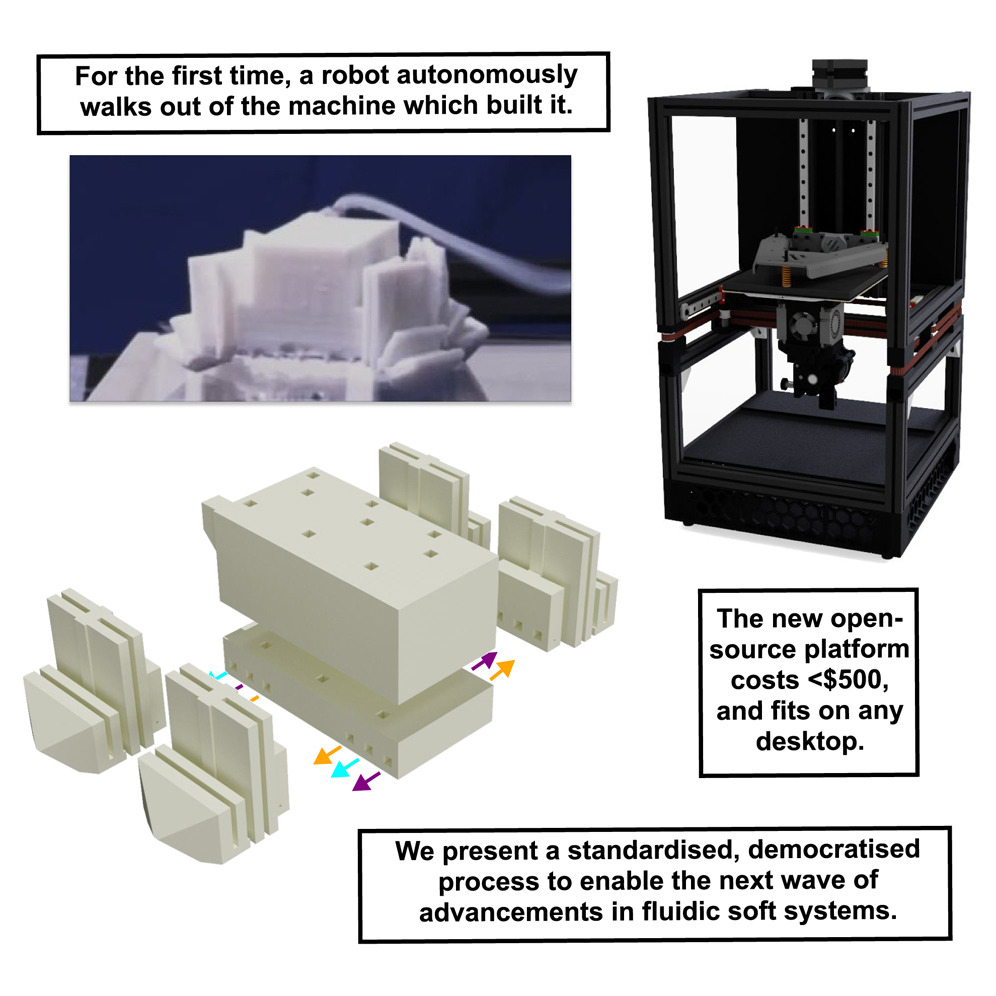
팀은 자체 제작한 시스템을 'Flex Printer'라고 명명하고 그 설계를 오픈 소스로 공개하기로 결정했습니다. 이 장치의 핵심 성능은 유체 채널 구축에 사용되는 레이어의 접착력과 신뢰도를 최적화하기 위해 프린팅 각도를 특정 각도로 배열하는 것에 달려 있습니다. 이는 시스템의 품질을 보장하는 데 결정적인 역할을 합니다.
팀은 이 프로젝트가 이 로봇 외에도 더 많은 유체 기반 시스템과 소프트 로봇 분야를 개척할 수 있기를 기대합니다. 이 기술에는 다양한 실제 활용 사례가 존재하므로, 단순히 작동 모습만 보는 것을 넘어 오픈 소스 공개를 통해 상세한 설계까지 접할 수 있다는 점이 매우 고무적입니다.
만약 특정 소프트 로봇 분야에 국한되지 않고 3D 프린팅 자체에 전반적인 관심이 있으시다면, 저희가 가장 선호하거나 추천하는 장비들을 파악할 수 있도록 최고의 3D 프린터 목록을 확인해보시길 추천합니다. 시작하는 데 복잡한 과정은 필요 없으며, 여정을 돕는 다양한 가이드가 준비되어 있습니다.
최신 뉴스, 분석, 리뷰를 피드에서 받고 싶으시다면 Google News에서 Tom's Hardware를 팔로우하세요. 팔로우 버튼을 클릭하는 것을 잊지 마세요.